The corridor following experiments were done in two distinct parts. The two parts were done with different robots, so the procedures used are different. I describe the robots used in the relevant sections.
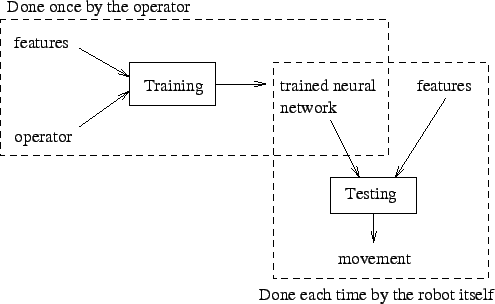
Usually, for testing or in regular use, the robot is autonomous and is not controlled by the operator. If the robot has to follow a corridor, we do not want the operator to modify the trajectory. The robot must perform its task by itself, without hitting anything. I therefore implemented a safety procedure based on infrared or sonar, depending which robot was being used. When a obstacle is detected using these sensors, the robot turns until there are no more obstacles, then moves forward for a while and finally restore its original direction by rotating using the opposite angle, so that the direction is the same as before. The general procedure used in normal behaviour is shown in figure 3.1. A neural network is trained by the designer of the robot. This procedure is done only once and produces a trained neural network that can be used each time afterwards. In regular use, each preprocessed image is used as an input to the neural network previously trained. The propagation of these inputs results in a prediction of the right movement to do in that particular situation. The following sections explain all the experimental procedures for each different experiment.
 |