FortyTwo is a Nomad 200 robot from Nomadic Technologies Inc [21]. It is a wheeled, fully autonomous robot.
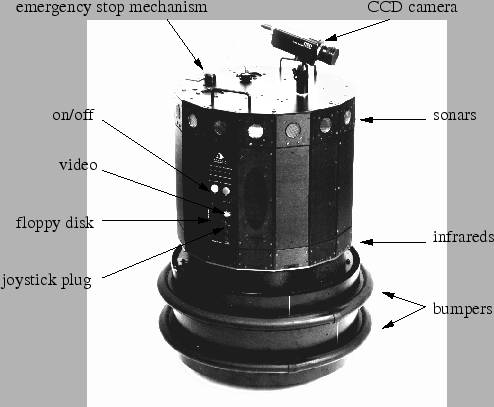
FortyTwo has 16 sonars sensors, 16 infrared sensors and 20 bumper sensors. These sensors are arranged in rings around the turret and the base.
FortyTwo has a three servo synchronous drive system powered by two 24 volt batteries. This allows the user to control the speed of the wheels and turn the turret and the base of the robot independently. There are two slots to plug batteries for motor control in parallel. Table 3.1 summarizes the maximum speed of each axes and other physical characteristics of FortyTwo.
The turret hosts a 486 PC (66 MHz) with 8 Mb of RAM and a 1Gb hard disk. A separate 24 volt battery powers the processor. We can change the battery by plugging another one in parallel without interrupting the processing. A speech synthesizer card is connected to the PC to provide full speech capability for the robot. A ``video blaster'' frame grabber is also connected to the PC in order to use a CCD camera. This card has its own memory which is directly mapped into RAM. A CCD monochrome camera is linked to it using a coaxial wire. The camera can provide 640x480 pixels at a frame rate of 25 images per second, which is more that the computer can process.
The robot can be controlled remotely via the Internet. Indeed, it is linked to the network with a radio link. This wireless network interface allows the user to run programs even if the robot is in another room or in a corridor. A graphical user interface can also be used to see the state of the sensors and to control the robot with a virtual joystick. The same graphical user interface can be used as a simulator, by placing virtual objects modelled by polygons in the scene.