Figure 3.4 shows the first experiment done with FortyTwo. The camera was not correctly oriented during the beginning of the testing. After a few iterations, I oriented it correctly so that it looks towards the end of the corridor. The camera was correctly oriented during the training which is represented by the sparse points in the odometry records shown in figure 3.4.
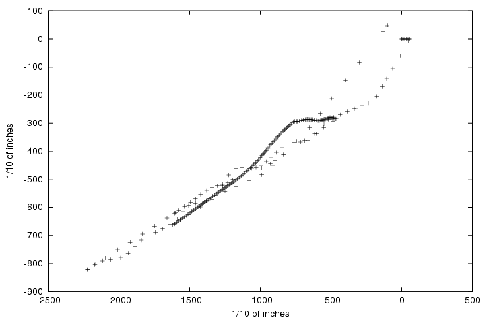 |
We see that the robot is able to follow the right direction after a while. The movement is smooth thanks to the way we drive the robot using a constant speed. It is interesting to see that at the beginning of the experiments the robot tries to avoid a box which is in front of it. The robot not know which way to go to avoid the box because the box does not generate a lot of edges when seen from this point of view.
Results of experiments done in the real corridor are shown on figures 3.5(a) and 3.5(b). These figures show that the robot does not take the right direction, but a slightly different one. Indeed, it has not be trained enough to perform its task accurately. Furthermore, the Pattern Associator used did not contain any bias. Adding a bias, that is a constant input, should correct this behaviour.
![\begin{figure}\begin{center}
\subfigure[Experiment one]{\epsfysize =7cm
\epsfb...
...periment two]{\epsfysize =7cm
\epsfbox{ps1all2.ps}
}
\end{center}
\end{figure}](img146.png) |
A change in the hardware used prevented us from doing other experiments with FortyTwo. Further experiments in corridor following were done with another robot: Charm.